Albert WuI am a Postdoctoral Research Associate at the AMBER Lab of the California Institute of Technology. I am supervised by Prof. Aaron D. Ames. My research explores the intersection of mathematical structures, physics-based modeling, and machine learning to develop generalizable algorithms for real-world robotic manipulation. I received my Ph.D. from the Computer Science Department at Stanford University. I was advised by Prof. C. Karen Liu. My thesis, "Unifying Physics and Learning for Generalizable Robotic Manipulation," is available here. Before Stanford, I received my B.S. and M.Eng. from the Electrical Engineering and Computer Science Department at the Massachusetts Institute of Technology, where I was advised by Prof. Russ Tedrake. My M.Eng. thesis is available here. I also worked as an undergraduate researcher in Prof. Hugh Herr's lab. Email / GitHub / Google Scholar / YouTube Last updated: 2026-07-28. |

|
ResearchMy research advances robotic manipulation and hybrid motion planning by integrating physics-based modeling with machine learning, drawing on differential geometry, nonlinear control, and optimization to develop robust and generalizable contact-rich motion policies. |

|
Safe and Steerable Geometric Motion Policies for Robotic Dexterous ManipulationAlbert Wu, Riccardo Bonalli, Thomas Lew, C. Karen Liu arXiv preprint, 2026 arxiv / website / youtube We present SafePBDS, a motion-generation framework that computes certifiably safe joint accelerations from task space objectives, safety constraints, and action inputs. SafePBDS enables simple action policies to achieve complex manipulation tasks, including 92.5–94.4% success on four- and three-finger grasps, and the first model-based, fully actuated palm-down in-hand reorientation beyond 360° under wrist motion and varying object weights. |

|
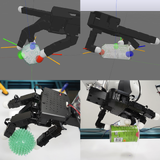
In the Wild Ungraspable Object Picking with Bimanual Nonprehensile ManipulationAlbert Wu, Dan Kruse International Conference on Robotics and Automation (ICRA), 2025 paper / arxiv / youtube We developed a method to retrieve grocery items that are difficult to grasp using traditional suction and parallel grippers. Through extensive testing in a replica store and a real-world grocery store, our mobile manipulator demonstrated high success rates in retrieving diverse ungraspable items from cluttered shelves. |

|
One-Shot Transfer of Long-Horizon Extrinsic Manipulation Through Contact RetargetingAlbert Wu, Ruocheng Wang, Sirui Chen, Clemens Eppner, C. Karen Liu International Conference on Intelligent Robots and Systems (IROS), 2024 Oral presentation paper / arxiv / code / website / youtube The use of environment contacts enables manipulation strategies that are otherwise impossible with a parallel jaw gripper. We propose to generalize one extrinsic manipulation trajectory to diverse objects and environments by retargeting contact requirements. Using a 7+1 DoF robotic arm-gripper system, we achieved an overall success rate of 80.5% on hardware over 4 long-horizon extrinsic manipulation tasks. |

|
Synthesize Dexterous Nonprehensile Pregrasp for Ungraspable ObjectsSirui Chen, Albert Wu, C. Karen Liu ACM SIGGRAPH, 2023 paper / arxiv We combine graph search, optimal control, and a learning-based objective function to synthesize dexterous pregrasp sequences for objects in initially ungraspable. |
|
Learning diverse and physically feasible dexterous grasps with generative model and bilevel optimizationAlbert Wu, Michelle Guo, C. Karen Liu Conference on Robot Learning (CoRL), 2022 paper / arxiv / code / youtube We use a generative model and a bilevel optimization to plan diverse grasp configurations on novel objects for a 4-fingered robotic hand. Our method achieved 86.7% real-world success rate on 20 household objects with unseen and challenging shape. |

|
Real-time model predictive control and system identification using differentiable simulationSirui Chen, Keenon Werling, Albert Wu, C. Karen Liu IEEE Robotics and Automation Letters (RA-L), 2022 paper / arxiv We present a method for continuous improvement of modeling and control after deploying the robot to a dynamically-changing target environment. We develop a differentiable physics simulation framework that simultaneously performs online system identification and optimal control using the incoming observations from the target environment in real time. Our method outperforms baseline methods on simulation and hardware experiments. |

|
Robust-RRT: Probabilistically-complete motion planning for uncertain nonlinear systemsAlbert Wu, Thomas Lew, Kiril Solovey, Edward Schmerling, Marco Pavone International Symposium of Robotics Research (ISRR), 2022 paper / arxiv / code / youtube We propose Robust-RRT, which integrates forward reachability analysis with rapidly-exploring random tree. Unlike exisiting robust planning algorithms, Robust-RRT is theoretically sound without restricitng the system structure. Specifically, Robust-RRT is probabilistically complete for nonlinear Lipschitz continuous dynamical systems with bounded uncertainty. Using sampling-based reachability analysis, we demonstrate Robust-RRT on simulated nonlinear, underactuated, and hybrid systems. |
|
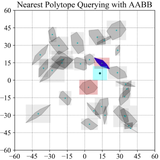
The Nearest Polytope Problem: Algorithms and Application to Controlling Hybrid SystemsAlbert Wu, Sadra Sadraddini, Russ Tedrake American Control Conference (ACC), 2020 paper / code Given a list of polytopes and a distance metric in Euclidean space, we seek an empirically fast algorithm to find the nearest polytope to a query point. We discuss the properties of 3 proposed algorithms and compare their performances using datasets motivated by control applications, including sampling-based motion planning and model predictive control. |
|
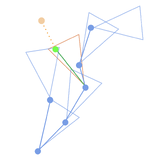
R3T: Rapidly-exploring random reachable set tree for optimal kinodynamic planning of nonlinear hybrid systemsAlbert Wu, Sadra Sadraddini, Russ Tedrake International Conference on Robotics and Automation (ICRA), 2020 paper / code / youtube R3T addresses the difficulty of defining distance in kinodynamic and hybrid systems by performing tree expansion with the (approximated) forward reachable sets. Under mild assumptions, R3T is probabilistically complete and asymptotically optimal through rewiring. The advantages of R3T are demonstrated on simulated nonlinear, hybrid, and contact-rich robotic systems. |
|
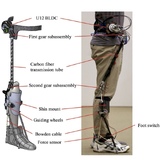
An autonomous exoskeleton for ankle plantarflexion assistanceAlbert Wu*, Xingbang Yang*, Jiun-Yih Kuan, Hugh M Herr *Equal contribution International Conference on Robotics and Automation (ICRA), 2019 paper We present an untethered, autonomous exoskeleton platform for ankle plantarflexion assistance. The exoskeleton is driven by bowden cables, which allows the actuator to be placed at the hip for reduced distal mass and inertia. |
Presentations |
|
Leveraging Physics-Based Models To Learn Generalizable Robotic ManipulationStanford Robotics Semninar, 2024-11-08 website / youtube In this talk, I explored how incorporating physical models can enable efficient learning of robust manipulation policies. I presented a series of projects that demonstrate how integrating physics priors and contact constraints into learning pipelines can facilitate the execution of sophisticated dexterous and nonprehensile tasks across a wide range of simulation and hardware environments. |
Other ProjectsThese include coursework, side projects and unpublished research work. |

|
Changing Utensils with Reinforcement LearningDexai Robotics Internship Project 2021-11 website / youtube I applied reinforcement learning to Dexai Robotics’s food serving robot for autonmous utensil change. |
|
Inertial Wheel PendulumMIT 6.115 Final Project 2018-05 pdf / youtube I made an intertial wheel pendulum for the MIT course 6.115 Microcomputer Project Lab. The nonlinear energy-shaping controller and local LQR controller are from an old assignment problem in 6.832 Underactuated Robotics. |
|
Website design and source code from Leonid Keselman and Jon Barron. |